


Einleitung
Wer mit der Informatik zu tun hat, wird sicher mal von NXTs gehört haben, entweder als Hobby, oder auch in der Schule im Informatik-Unterricht. NXTs kombinieren die unendliche Schaffungsvielfalt von Lego mit einem intelligenten Kern mit mehreren Motoren, Sensoren und Tastern, um sich seine eigenen Roboter, Maschinen usw. bauen zu können. Die Programmierung des NXTs ist sehr einfach gehalten, um auch kleineren Kindern den Umgang zu erleichtern, man könnte theoretisch aber ach Maschinencode schreiben, deshalb müsste man den NXT aber erst hacken, was auch schief gehen kann, weshalb wir das für unser Projekt nicht getan haben.
Ziel
Wir wollten ohne Baupläne unser eigenes Auto selbst gestalten und programmieren. Das Auto sollte einigermassen gut aussehen und selbstständig fahren können. Es soll solange geradeaus fahren, bis es mit Hilfe des Entfernungsmessers eine Wand erkennt. Wenn dies der Fall ist, fährt es rückwärts in einer 90 Grad Kurve. Danach fährt es wieder weiter bis zur nächsten Wand, wo sich die ganze Prozedur wiederholt.
Was ist ein NXT?
Der NXT ist ein Steuerungscomputer der Firma Lego. Er besitzt Anschlüsse für mehrere Sensoren und Aktoren, sowie USB- und Bluetooth-Schnittstellen. Der Computer kann über spezielle Programmiersprachen am PC programmiert werden und mit den Sensoren und Aktoren kommunizieren.
Vorgehen
Erster Versuch
Da unser NXT zu Beginn noch in einem vorherigen Lego-Konstrukt steckte, mussten wir diesen am ersten Tag erst mal auseinanderbauen und die einzelnen Teile einsortieren, um einen besseren Überblick zu bekommen. Dafür haben wir eine Kartonkiste genommen und mithilfe von Papier mehrere Kammern gebaut.
Nach dem Sortieren haben wir versucht die Hinterräder am NXT anzubringen.
Um dies zu realisieren haben wir einen Motor verwendet, der hinter dem NXT montiert wurde. Mit diesem Motor wollten wir gleich beide Hinterräder in Bewegung bringen. Zudem wurde vorne eine Achse, mittels eines Motors, gebaut. Mit dieser Achse wollten wir unserem Auto die Lenkung ermöglichen. Leider war es nicht sehr einfach dies zu bauen, weshalb wir erst mit Zahnrädern rumprobieren mussten. Schlussendlich haben wir es trotzdem nicht geschafft, da wir den Motor nicht mittig platzieren konnten, wodurch die Lenkung nicht richtig funktionierte.
Ausserdem haben wir die Hinter- und Vorderräder nicht stabil genug mit dem NXT verbunden, wodurch der NXT beim Fahren den Boden berührte. Da auch die Konstruktion der Lenkung nicht optimal war und wir das in diesem Zustand nicht mehr realisieren konnten, haben wir einen Neustart in Erwägung gezogen. Der Neustart soll kompakter und stabiler werden.

Zweiter Versuch
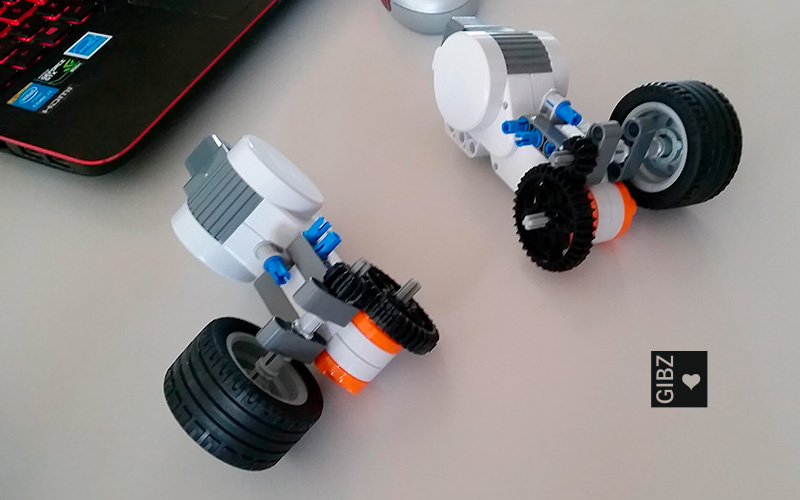
Unser zweiter Versuch ist glimpflicher gestartet als der Erste. Wir haben uns dafür entschieden, dass zwei Motoren die Hinterräder in Bewegung bringen sollen. Um dies zu ermöglichen haben wir auf die Hilfe von Zahnrädern gegriffen. Zuerst wurde ein grosses Zahnrad direkt am Motor befestigt. Dieses wurde dann in ein kleineres Zahnrad am Rad verzahnt.
Für die Umsetzung der Lenkung blieb uns nur noch ein Motor übrig. Um die Lenkung umzusetzen liessen wir uns von einem bereits gebauten Legoauto inspirieren, denn nur so konnten wir die komplizierte Lenkung einigermassen vernünftig umsetzen.
Als wir das Gerüst des Unterbaus hatten, befestigten wir den NXT oben drauf. Mit Hilfe von “Stangen” wurde er zusätzlich befestigt. Die Verkabelung konnten wir sehr gut unter dem NXT verstecken.
Wir waren sehr erfreut, als unser Auto lief, doch leider sah es nur einigermassen wie ein Auto aus. Um unserem Fahrzeug den letzten Schliff zu geben, montierten wir dierestlichen Teile, um das Aussehen eines Autos zu erreichen.
Als der Bau des Autos abgeschlossen war, wurde die Programmierarbeit gestartet. Da wir im Bereich der NXT Programmierung noch rechte Anfänger waren, enthielt unser erster Code nur die Funktion “Fahren”. Somit konnte unser Auto gerade aus fahren. Im zweiten Schritt implementierten wir, mit Hilfe des Entfernungssensors, den Rest. Im Endeffekt kann unser Auto nun gerade aus fahren bis eine 25 Zentimeter entfernten Hindernis kommt. Dann stoppt das Fahrzeug, legt den Rückwärtsgang ein und dreht dabei eine 90° Kurve. Wenn dies abgeschlossen ist, fährt es wieder weiter gerade aus bis zum nächsten Hindernis .
Komplikationen gab es nur bei der Kurve. Da wir nicht genau wussten, wann eine 90° erreicht ist, mussten wir viel herum probieren, bis wir unser gewünschtes Ergebnis bekamen. Vor der richtigen Implementierung kam es ab und zu vor, dass das Auto nur noch im Kreis fuhr.
Programmierung
Unser Auto soll erst solange geradeausfahren, bis es auf eine Wand stösst. Um dies zu erreichen haben wir uns mit zwei Schleifen bedient. Die grosse Schleife wiederholt das Programm ins unendlich und die kleinere Schleife lässt das Fahrzeug solange gerade aus fahren, bis ein Hindernis erkennt wird. Mittels des Bewegungssensors können wir bestimmen, wann die Schleife abgebrochen wird. Wenn das Fahrzeug nun an ein Hindernis ranfährt und eine Distanz von 25 Zenimetern unterschreitet, stoppt es. Dann fährt es rückwärts und dreht dabei eine 90° Kurve. Anschliessend fährt das Fahrzeug wieder gerade aus und der Code beginnt von vorne.
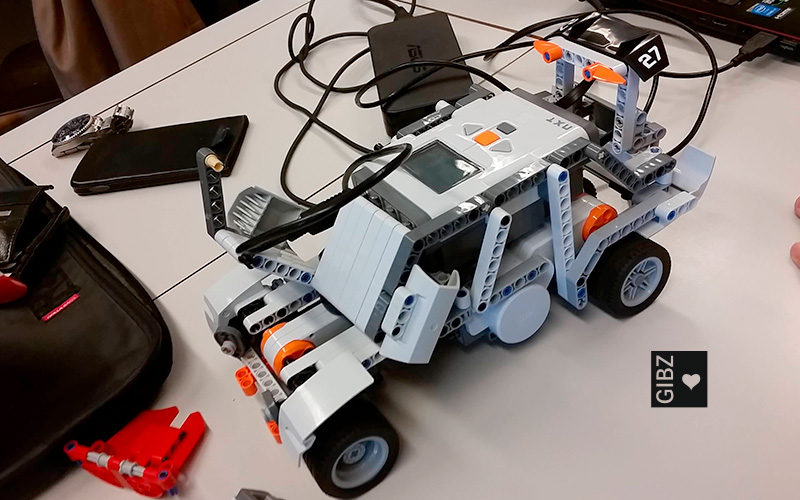
Endergebnis

© Kilian Iten & Fabio Stuber
Projektarbeit im Fach CST3, betreut von Rolf H. Hirschi


Hotel – Klassenvertiefungsarbeit der SR3")
